363259
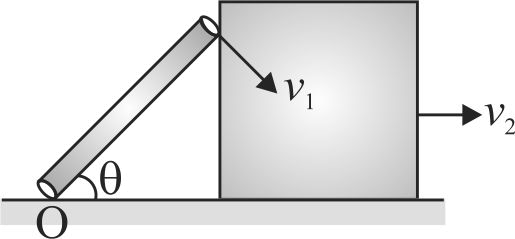
A rod is hinged about the fixed point \(O\) and it can rotate about \(O\). If the rod is in contact with the wedge, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\cos \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\)
Explanation:
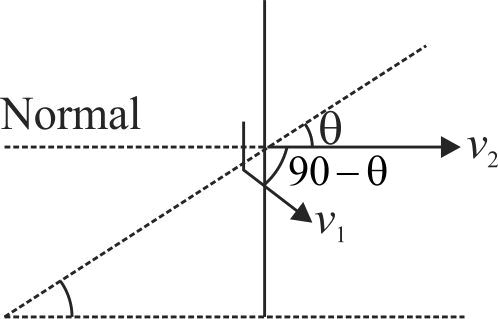
The surfaces of rod and wedge that are in contact are as shown below. \({v_2} = {v_1}\cos {\rm{(90 - \theta )}} \Rightarrow {v_2} = {v_1}\sin \theta \)
PHXI05:LAWS OF MOTION
363260
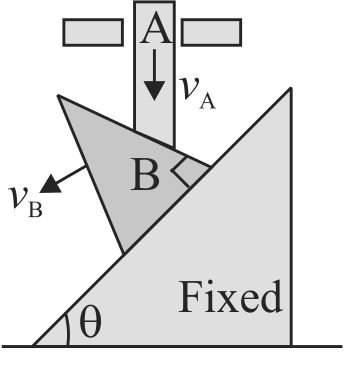
If the rod \(A\) and wedge \(B\) are in contact then find the relation between \({v_A}\) & \({v_B}\)
1 \({v_B} = {v_A}\tan \theta \)
2 \({v_B} = {v_A}\cot \theta \)
3 \({v_B} = {v_A}\sin \theta \)
4 \({v_B} = {v_A}\cos \theta \)
Explanation:
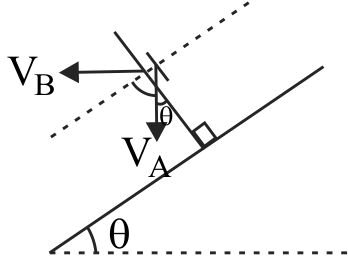
The two surfaces which are in contact are shown below. \({v_A}\cos (90 - \theta ) = {v_B}\cos \theta \) The velocity components must be same along the normal. \({v_A}\sin \theta = {v_B}\cos \theta \) \( \Rightarrow {v_B} = {v_A}{\mkern 1mu} \tan \theta .\)
PHXI05:LAWS OF MOTION
363261
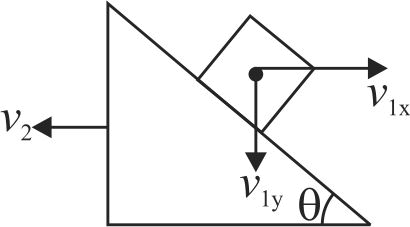
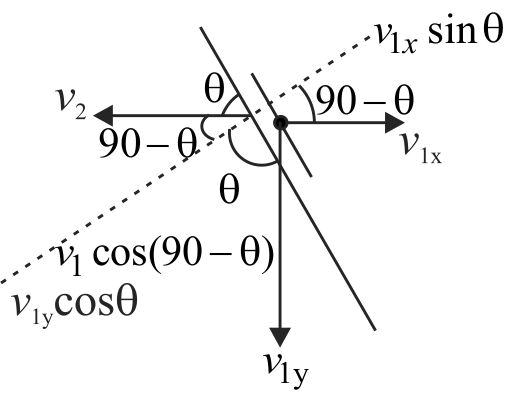
If the block and the wedge are in contact then find the condition in terms of velocities.
The two surfaces which are in contact are shown below. \({v_2}\) component \(=\) net \({v_1}\) component (along normal direction) \({v_2}\,\,\sin \,\theta = {v_{1y}}\,\cos \,\theta - {v_{1x}}\,\sin \theta \)
PHXI05:LAWS OF MOTION
363262
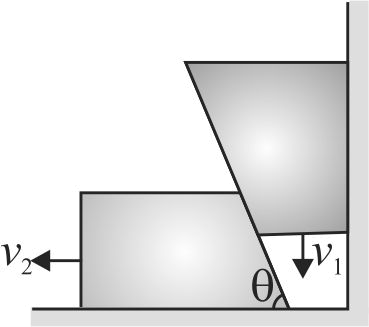
If the two blocks are in contact with each other, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\tan \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\cos \theta \)
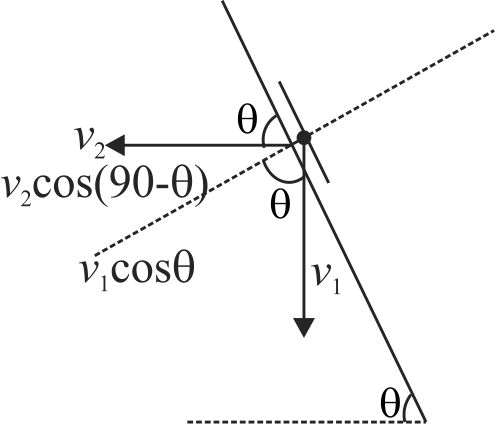
Explanation:
The two surfaces are as shown below. \({v_1}\,\cos \theta = {v_2}\cos \left( {90 - \theta } \right)\) \({v_1}\,\cos \theta = {v_2}\,\sin \theta \) \({v_1} = {v_2}\tan \theta \)
PHXI05:LAWS OF MOTION
363263
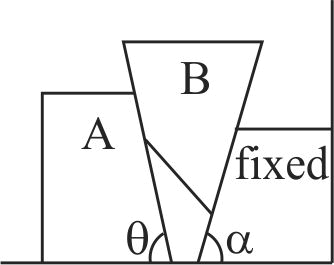
In the arrangement shown in the figure, if the acceleration of \(B\) is a then the acceleration of \(A\) is
1 \(a\sin \alpha \)
2 \(a{\mathop{\rm Tan}\nolimits} \theta \)
3 \(a\cot \theta \)
4 \(a(\cos \alpha + \sin \alpha \cot \theta )\)
Explanation:
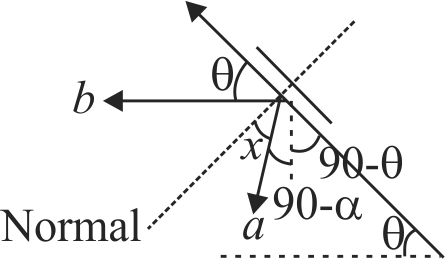
The block \(B\) slides along the fixed inclined surface. Acceleration of \(B\) makes an angle \(90 - \alpha \) w.r.to vertical direction.The surfaces of \(A\) and \(B\) which are in contact are shown below. Here \(b\) is the acceleration of \(A\) From the figure \(x + 90 - \theta + 90 - \alpha = 90 \Rightarrow x = (\alpha + \theta ) - 90\) As the two surfaces are in contact \(a\cos [(\alpha + \theta ) - 90] = b\cos (90 - \theta )\) \(a\sin (\alpha + \theta ) = b\sin \theta \) \(b = \frac{a}{{\sin \theta }}[\sin \alpha \cos \theta + \cos \alpha \sin \theta ]\) \(b = a[\sin \alpha \cot \theta + \cos \alpha ]\)
363259
A rod is hinged about the fixed point \(O\) and it can rotate about \(O\). If the rod is in contact with the wedge, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\cos \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\)
Explanation:
The surfaces of rod and wedge that are in contact are as shown below. \({v_2} = {v_1}\cos {\rm{(90 - \theta )}} \Rightarrow {v_2} = {v_1}\sin \theta \)
PHXI05:LAWS OF MOTION
363260
If the rod \(A\) and wedge \(B\) are in contact then find the relation between \({v_A}\) & \({v_B}\)
1 \({v_B} = {v_A}\tan \theta \)
2 \({v_B} = {v_A}\cot \theta \)
3 \({v_B} = {v_A}\sin \theta \)
4 \({v_B} = {v_A}\cos \theta \)
Explanation:
The two surfaces which are in contact are shown below. \({v_A}\cos (90 - \theta ) = {v_B}\cos \theta \) The velocity components must be same along the normal. \({v_A}\sin \theta = {v_B}\cos \theta \) \( \Rightarrow {v_B} = {v_A}{\mkern 1mu} \tan \theta .\)
PHXI05:LAWS OF MOTION
363261
If the block and the wedge are in contact then find the condition in terms of velocities.
The two surfaces which are in contact are shown below. \({v_2}\) component \(=\) net \({v_1}\) component (along normal direction) \({v_2}\,\,\sin \,\theta = {v_{1y}}\,\cos \,\theta - {v_{1x}}\,\sin \theta \)
PHXI05:LAWS OF MOTION
363262
If the two blocks are in contact with each other, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\tan \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\cos \theta \)
Explanation:
The two surfaces are as shown below. \({v_1}\,\cos \theta = {v_2}\cos \left( {90 - \theta } \right)\) \({v_1}\,\cos \theta = {v_2}\,\sin \theta \) \({v_1} = {v_2}\tan \theta \)
PHXI05:LAWS OF MOTION
363263
In the arrangement shown in the figure, if the acceleration of \(B\) is a then the acceleration of \(A\) is
1 \(a\sin \alpha \)
2 \(a{\mathop{\rm Tan}\nolimits} \theta \)
3 \(a\cot \theta \)
4 \(a(\cos \alpha + \sin \alpha \cot \theta )\)
Explanation:
The block \(B\) slides along the fixed inclined surface. Acceleration of \(B\) makes an angle \(90 - \alpha \) w.r.to vertical direction.The surfaces of \(A\) and \(B\) which are in contact are shown below. Here \(b\) is the acceleration of \(A\) From the figure \(x + 90 - \theta + 90 - \alpha = 90 \Rightarrow x = (\alpha + \theta ) - 90\) As the two surfaces are in contact \(a\cos [(\alpha + \theta ) - 90] = b\cos (90 - \theta )\) \(a\sin (\alpha + \theta ) = b\sin \theta \) \(b = \frac{a}{{\sin \theta }}[\sin \alpha \cos \theta + \cos \alpha \sin \theta ]\) \(b = a[\sin \alpha \cot \theta + \cos \alpha ]\)
363259
A rod is hinged about the fixed point \(O\) and it can rotate about \(O\). If the rod is in contact with the wedge, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\cos \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\)
Explanation:
The surfaces of rod and wedge that are in contact are as shown below. \({v_2} = {v_1}\cos {\rm{(90 - \theta )}} \Rightarrow {v_2} = {v_1}\sin \theta \)
PHXI05:LAWS OF MOTION
363260
If the rod \(A\) and wedge \(B\) are in contact then find the relation between \({v_A}\) & \({v_B}\)
1 \({v_B} = {v_A}\tan \theta \)
2 \({v_B} = {v_A}\cot \theta \)
3 \({v_B} = {v_A}\sin \theta \)
4 \({v_B} = {v_A}\cos \theta \)
Explanation:
The two surfaces which are in contact are shown below. \({v_A}\cos (90 - \theta ) = {v_B}\cos \theta \) The velocity components must be same along the normal. \({v_A}\sin \theta = {v_B}\cos \theta \) \( \Rightarrow {v_B} = {v_A}{\mkern 1mu} \tan \theta .\)
PHXI05:LAWS OF MOTION
363261
If the block and the wedge are in contact then find the condition in terms of velocities.
The two surfaces which are in contact are shown below. \({v_2}\) component \(=\) net \({v_1}\) component (along normal direction) \({v_2}\,\,\sin \,\theta = {v_{1y}}\,\cos \,\theta - {v_{1x}}\,\sin \theta \)
PHXI05:LAWS OF MOTION
363262
If the two blocks are in contact with each other, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\tan \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\cos \theta \)
Explanation:
The two surfaces are as shown below. \({v_1}\,\cos \theta = {v_2}\cos \left( {90 - \theta } \right)\) \({v_1}\,\cos \theta = {v_2}\,\sin \theta \) \({v_1} = {v_2}\tan \theta \)
PHXI05:LAWS OF MOTION
363263
In the arrangement shown in the figure, if the acceleration of \(B\) is a then the acceleration of \(A\) is
1 \(a\sin \alpha \)
2 \(a{\mathop{\rm Tan}\nolimits} \theta \)
3 \(a\cot \theta \)
4 \(a(\cos \alpha + \sin \alpha \cot \theta )\)
Explanation:
The block \(B\) slides along the fixed inclined surface. Acceleration of \(B\) makes an angle \(90 - \alpha \) w.r.to vertical direction.The surfaces of \(A\) and \(B\) which are in contact are shown below. Here \(b\) is the acceleration of \(A\) From the figure \(x + 90 - \theta + 90 - \alpha = 90 \Rightarrow x = (\alpha + \theta ) - 90\) As the two surfaces are in contact \(a\cos [(\alpha + \theta ) - 90] = b\cos (90 - \theta )\) \(a\sin (\alpha + \theta ) = b\sin \theta \) \(b = \frac{a}{{\sin \theta }}[\sin \alpha \cos \theta + \cos \alpha \sin \theta ]\) \(b = a[\sin \alpha \cot \theta + \cos \alpha ]\)
363259
A rod is hinged about the fixed point \(O\) and it can rotate about \(O\). If the rod is in contact with the wedge, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\cos \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\)
Explanation:
The surfaces of rod and wedge that are in contact are as shown below. \({v_2} = {v_1}\cos {\rm{(90 - \theta )}} \Rightarrow {v_2} = {v_1}\sin \theta \)
PHXI05:LAWS OF MOTION
363260
If the rod \(A\) and wedge \(B\) are in contact then find the relation between \({v_A}\) & \({v_B}\)
1 \({v_B} = {v_A}\tan \theta \)
2 \({v_B} = {v_A}\cot \theta \)
3 \({v_B} = {v_A}\sin \theta \)
4 \({v_B} = {v_A}\cos \theta \)
Explanation:
The two surfaces which are in contact are shown below. \({v_A}\cos (90 - \theta ) = {v_B}\cos \theta \) The velocity components must be same along the normal. \({v_A}\sin \theta = {v_B}\cos \theta \) \( \Rightarrow {v_B} = {v_A}{\mkern 1mu} \tan \theta .\)
PHXI05:LAWS OF MOTION
363261
If the block and the wedge are in contact then find the condition in terms of velocities.
The two surfaces which are in contact are shown below. \({v_2}\) component \(=\) net \({v_1}\) component (along normal direction) \({v_2}\,\,\sin \,\theta = {v_{1y}}\,\cos \,\theta - {v_{1x}}\,\sin \theta \)
PHXI05:LAWS OF MOTION
363262
If the two blocks are in contact with each other, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\tan \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\cos \theta \)
Explanation:
The two surfaces are as shown below. \({v_1}\,\cos \theta = {v_2}\cos \left( {90 - \theta } \right)\) \({v_1}\,\cos \theta = {v_2}\,\sin \theta \) \({v_1} = {v_2}\tan \theta \)
PHXI05:LAWS OF MOTION
363263
In the arrangement shown in the figure, if the acceleration of \(B\) is a then the acceleration of \(A\) is
1 \(a\sin \alpha \)
2 \(a{\mathop{\rm Tan}\nolimits} \theta \)
3 \(a\cot \theta \)
4 \(a(\cos \alpha + \sin \alpha \cot \theta )\)
Explanation:
The block \(B\) slides along the fixed inclined surface. Acceleration of \(B\) makes an angle \(90 - \alpha \) w.r.to vertical direction.The surfaces of \(A\) and \(B\) which are in contact are shown below. Here \(b\) is the acceleration of \(A\) From the figure \(x + 90 - \theta + 90 - \alpha = 90 \Rightarrow x = (\alpha + \theta ) - 90\) As the two surfaces are in contact \(a\cos [(\alpha + \theta ) - 90] = b\cos (90 - \theta )\) \(a\sin (\alpha + \theta ) = b\sin \theta \) \(b = \frac{a}{{\sin \theta }}[\sin \alpha \cos \theta + \cos \alpha \sin \theta ]\) \(b = a[\sin \alpha \cot \theta + \cos \alpha ]\)
363259
A rod is hinged about the fixed point \(O\) and it can rotate about \(O\). If the rod is in contact with the wedge, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\cos \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\)
Explanation:
The surfaces of rod and wedge that are in contact are as shown below. \({v_2} = {v_1}\cos {\rm{(90 - \theta )}} \Rightarrow {v_2} = {v_1}\sin \theta \)
PHXI05:LAWS OF MOTION
363260
If the rod \(A\) and wedge \(B\) are in contact then find the relation between \({v_A}\) & \({v_B}\)
1 \({v_B} = {v_A}\tan \theta \)
2 \({v_B} = {v_A}\cot \theta \)
3 \({v_B} = {v_A}\sin \theta \)
4 \({v_B} = {v_A}\cos \theta \)
Explanation:
The two surfaces which are in contact are shown below. \({v_A}\cos (90 - \theta ) = {v_B}\cos \theta \) The velocity components must be same along the normal. \({v_A}\sin \theta = {v_B}\cos \theta \) \( \Rightarrow {v_B} = {v_A}{\mkern 1mu} \tan \theta .\)
PHXI05:LAWS OF MOTION
363261
If the block and the wedge are in contact then find the condition in terms of velocities.
The two surfaces which are in contact are shown below. \({v_2}\) component \(=\) net \({v_1}\) component (along normal direction) \({v_2}\,\,\sin \,\theta = {v_{1y}}\,\cos \,\theta - {v_{1x}}\,\sin \theta \)
PHXI05:LAWS OF MOTION
363262
If the two blocks are in contact with each other, then find the relation between \({v_{1\,}}\,\,\& \,\,{v_2}\)
1 \({v_1} = {v_2}\sin \theta \)
2 \({v_1} = {v_2}\tan \theta \)
3 \({v_2} = {v_1}\sin \theta \)
4 \({v_1} = {v_2}\cos \theta \)
Explanation:
The two surfaces are as shown below. \({v_1}\,\cos \theta = {v_2}\cos \left( {90 - \theta } \right)\) \({v_1}\,\cos \theta = {v_2}\,\sin \theta \) \({v_1} = {v_2}\tan \theta \)
PHXI05:LAWS OF MOTION
363263
In the arrangement shown in the figure, if the acceleration of \(B\) is a then the acceleration of \(A\) is
1 \(a\sin \alpha \)
2 \(a{\mathop{\rm Tan}\nolimits} \theta \)
3 \(a\cot \theta \)
4 \(a(\cos \alpha + \sin \alpha \cot \theta )\)
Explanation:
The block \(B\) slides along the fixed inclined surface. Acceleration of \(B\) makes an angle \(90 - \alpha \) w.r.to vertical direction.The surfaces of \(A\) and \(B\) which are in contact are shown below. Here \(b\) is the acceleration of \(A\) From the figure \(x + 90 - \theta + 90 - \alpha = 90 \Rightarrow x = (\alpha + \theta ) - 90\) As the two surfaces are in contact \(a\cos [(\alpha + \theta ) - 90] = b\cos (90 - \theta )\) \(a\sin (\alpha + \theta ) = b\sin \theta \) \(b = \frac{a}{{\sin \theta }}[\sin \alpha \cos \theta + \cos \alpha \sin \theta ]\) \(b = a[\sin \alpha \cot \theta + \cos \alpha ]\)