366136
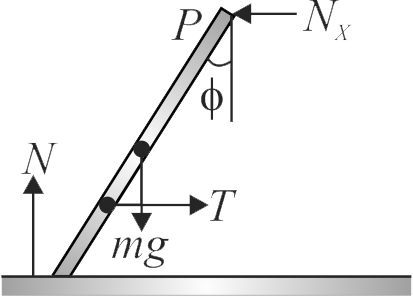
A uniform \(\operatorname{rod} A B\) is suspended from a point \(X\), at a variable distance \(x\) from \(\mathrm{A}\), as shown. To make the rod horizontal, a mass \(m\) is suspended from its end A. A set of \((m, x)\) values is recorded. The appropriate variables that give a straight line, when plotted, are: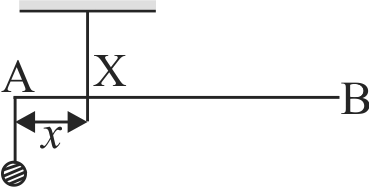
366136
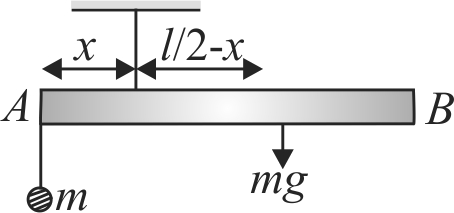
A uniform \(\operatorname{rod} A B\) is suspended from a point \(X\), at a variable distance \(x\) from \(\mathrm{A}\), as shown. To make the rod horizontal, a mass \(m\) is suspended from its end A. A set of \((m, x)\) values is recorded. The appropriate variables that give a straight line, when plotted, are:
366136
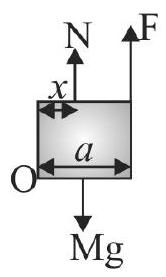
A uniform \(\operatorname{rod} A B\) is suspended from a point \(X\), at a variable distance \(x\) from \(\mathrm{A}\), as shown. To make the rod horizontal, a mass \(m\) is suspended from its end A. A set of \((m, x)\) values is recorded. The appropriate variables that give a straight line, when plotted, are:
366136
A uniform \(\operatorname{rod} A B\) is suspended from a point \(X\), at a variable distance \(x\) from \(\mathrm{A}\), as shown. To make the rod horizontal, a mass \(m\) is suspended from its end A. A set of \((m, x)\) values is recorded. The appropriate variables that give a straight line, when plotted, are: