366191
Assertion : Torque due to force is maximum when angle is \(90^{\circ}\). Reason : The unit of torque is 'Newton-metre'.
1 Both Assertion and Reason are correct and Reason is the correct explanation of the Assertion.
2 Both Assertion and Reason are correct but Reason is not the correct explanation of the Assertion.
3 Assertion is correct but Reason is incorrect.
4 Assertion is incorrect but reason is correct.
Explanation:
Torque \(\tau=r F \sin \theta\). Torque is maximum when the force is applied perpendicular to the lever arm (angle \(\theta=90^{\circ}\) ). The unit of torque is indeed Newton-meter. Reason does not explain Assertion. So correct option is (2).
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366192
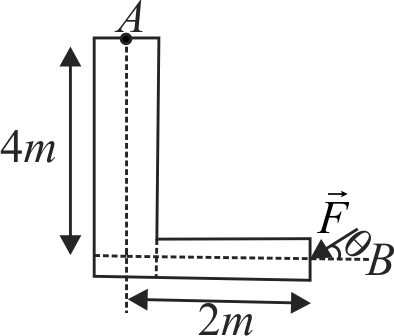
A force of \(40 \mathrm{~N}\) acts on a point \(\mathrm{B}\) at the end of an L-shaped object as shown in the figure. The angle \(\theta\) that will produce maximum moment of the force about point \(\mathrm{A}\) is given by:
1 \(\tan \theta=4\)
2 \(\tan \theta=\dfrac{1}{4}\)
3 \(\tan \theta=\dfrac{1}{2}\)
4 \(\tan \theta=2\)
Explanation:
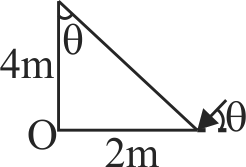
Moment of force will be maximum when line of action of force is perpendicular to line \(\mathrm{AB}\). \(\tan \theta=\dfrac{2}{4}=\dfrac{1}{2}\)
JEE - 2018
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366193
A force \(\vec{F}=4 \hat{i}-5 \hat{j}+3 \hat{k}\) is acting at a point \(\vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}\). The torque acting about a point \(\vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k}\) is
1 \(42 \hat{i}-30 \hat{j}+6 \hat{k}\)
2 Zero
3 \(42 \hat{i}+30 \hat{j}-6 \hat{k}\)
4 \(42 \hat{i}+30 \hat{j}+6 \hat{k}\)
Explanation:
Position vector of the point at which force is acting \(\begin{aligned}& \vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}, \quad \vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k} \\& \overrightarrow{r_{12}}=\overrightarrow{r_{1}}-\overrightarrow{r_{2}}=(\hat{i}+2 \hat{j}+3 \hat{k})-(3 \hat{i}-2 \hat{j}-3 \hat{k}) \\& =-2 \hat{i}+4 \hat{j}+6 \hat{k}\end{aligned}\) Now \(\vec{\tau}=\overrightarrow{r_{12}} \times \vec{F}=(-2 \hat{i}+4 \hat{j}+6 \hat{k}) \times(4 \hat{i}-5 \hat{j}+3 \hat{k})\) \(\begin{aligned}& \vec{\tau}=\left|\begin{array}{ccc}\hat{i} & \hat{j} & \hat{k} \\-2 & 4 & 6 \\4 & -5 & 3\end{array}\right| \\& =\hat{i}(12+30)-\hat{j}(-6-24)+\hat{k}(10-16) \\& =(42 \hat{i}+30 \hat{j}-6 \hat{k}) N-m\end{aligned}\)
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366194
A force \(\vec{F}=5 \hat{i}+2 \hat{j}-5 \hat{k}\) acts on a particle whose position vector is \(\vec{r}=\hat{i}-2 \hat{j}+\hat{k}\). What is the torque about the origin?
366195
A thin rod of mass \(m\) and length \(l\) is made to rotate about an axis passing through its centre and perpendicular to it. If its angular velocity changes from 0 to \(\omega\) in time \(t\), the torque acting on it is
1 \(\dfrac{m \ell^{2} \omega}{12 t}\)
2 \(\dfrac{m \ell^{2} \omega}{3 t}\)
3 \(\dfrac{m \ell^{2} \omega}{t}\)
4 \(\dfrac{4 m \ell^{2} \omega}{3 t}\)
Explanation:
Since, \(\tau=I \alpha\) So, \(\tau=\left(\dfrac{m(2 \ell)^{2}}{12}\right)\left(\dfrac{\omega}{t}\right)\) or \(\tau=\dfrac{m \times 4 \ell^{2} \times \omega}{12 \times t}\) Or \(\tau = \frac{{4m{\ell ^2}\omega }}{{12t}} = \left( {\frac{{m{\ell ^2}\omega }}{{3t}}} \right)\)
366191
Assertion : Torque due to force is maximum when angle is \(90^{\circ}\). Reason : The unit of torque is 'Newton-metre'.
1 Both Assertion and Reason are correct and Reason is the correct explanation of the Assertion.
2 Both Assertion and Reason are correct but Reason is not the correct explanation of the Assertion.
3 Assertion is correct but Reason is incorrect.
4 Assertion is incorrect but reason is correct.
Explanation:
Torque \(\tau=r F \sin \theta\). Torque is maximum when the force is applied perpendicular to the lever arm (angle \(\theta=90^{\circ}\) ). The unit of torque is indeed Newton-meter. Reason does not explain Assertion. So correct option is (2).
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366192
A force of \(40 \mathrm{~N}\) acts on a point \(\mathrm{B}\) at the end of an L-shaped object as shown in the figure. The angle \(\theta\) that will produce maximum moment of the force about point \(\mathrm{A}\) is given by:
1 \(\tan \theta=4\)
2 \(\tan \theta=\dfrac{1}{4}\)
3 \(\tan \theta=\dfrac{1}{2}\)
4 \(\tan \theta=2\)
Explanation:
Moment of force will be maximum when line of action of force is perpendicular to line \(\mathrm{AB}\). \(\tan \theta=\dfrac{2}{4}=\dfrac{1}{2}\)
JEE - 2018
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366193
A force \(\vec{F}=4 \hat{i}-5 \hat{j}+3 \hat{k}\) is acting at a point \(\vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}\). The torque acting about a point \(\vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k}\) is
1 \(42 \hat{i}-30 \hat{j}+6 \hat{k}\)
2 Zero
3 \(42 \hat{i}+30 \hat{j}-6 \hat{k}\)
4 \(42 \hat{i}+30 \hat{j}+6 \hat{k}\)
Explanation:
Position vector of the point at which force is acting \(\begin{aligned}& \vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}, \quad \vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k} \\& \overrightarrow{r_{12}}=\overrightarrow{r_{1}}-\overrightarrow{r_{2}}=(\hat{i}+2 \hat{j}+3 \hat{k})-(3 \hat{i}-2 \hat{j}-3 \hat{k}) \\& =-2 \hat{i}+4 \hat{j}+6 \hat{k}\end{aligned}\) Now \(\vec{\tau}=\overrightarrow{r_{12}} \times \vec{F}=(-2 \hat{i}+4 \hat{j}+6 \hat{k}) \times(4 \hat{i}-5 \hat{j}+3 \hat{k})\) \(\begin{aligned}& \vec{\tau}=\left|\begin{array}{ccc}\hat{i} & \hat{j} & \hat{k} \\-2 & 4 & 6 \\4 & -5 & 3\end{array}\right| \\& =\hat{i}(12+30)-\hat{j}(-6-24)+\hat{k}(10-16) \\& =(42 \hat{i}+30 \hat{j}-6 \hat{k}) N-m\end{aligned}\)
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366194
A force \(\vec{F}=5 \hat{i}+2 \hat{j}-5 \hat{k}\) acts on a particle whose position vector is \(\vec{r}=\hat{i}-2 \hat{j}+\hat{k}\). What is the torque about the origin?
366195
A thin rod of mass \(m\) and length \(l\) is made to rotate about an axis passing through its centre and perpendicular to it. If its angular velocity changes from 0 to \(\omega\) in time \(t\), the torque acting on it is
1 \(\dfrac{m \ell^{2} \omega}{12 t}\)
2 \(\dfrac{m \ell^{2} \omega}{3 t}\)
3 \(\dfrac{m \ell^{2} \omega}{t}\)
4 \(\dfrac{4 m \ell^{2} \omega}{3 t}\)
Explanation:
Since, \(\tau=I \alpha\) So, \(\tau=\left(\dfrac{m(2 \ell)^{2}}{12}\right)\left(\dfrac{\omega}{t}\right)\) or \(\tau=\dfrac{m \times 4 \ell^{2} \times \omega}{12 \times t}\) Or \(\tau = \frac{{4m{\ell ^2}\omega }}{{12t}} = \left( {\frac{{m{\ell ^2}\omega }}{{3t}}} \right)\)
366191
Assertion : Torque due to force is maximum when angle is \(90^{\circ}\). Reason : The unit of torque is 'Newton-metre'.
1 Both Assertion and Reason are correct and Reason is the correct explanation of the Assertion.
2 Both Assertion and Reason are correct but Reason is not the correct explanation of the Assertion.
3 Assertion is correct but Reason is incorrect.
4 Assertion is incorrect but reason is correct.
Explanation:
Torque \(\tau=r F \sin \theta\). Torque is maximum when the force is applied perpendicular to the lever arm (angle \(\theta=90^{\circ}\) ). The unit of torque is indeed Newton-meter. Reason does not explain Assertion. So correct option is (2).
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366192
A force of \(40 \mathrm{~N}\) acts on a point \(\mathrm{B}\) at the end of an L-shaped object as shown in the figure. The angle \(\theta\) that will produce maximum moment of the force about point \(\mathrm{A}\) is given by:
1 \(\tan \theta=4\)
2 \(\tan \theta=\dfrac{1}{4}\)
3 \(\tan \theta=\dfrac{1}{2}\)
4 \(\tan \theta=2\)
Explanation:
Moment of force will be maximum when line of action of force is perpendicular to line \(\mathrm{AB}\). \(\tan \theta=\dfrac{2}{4}=\dfrac{1}{2}\)
JEE - 2018
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366193
A force \(\vec{F}=4 \hat{i}-5 \hat{j}+3 \hat{k}\) is acting at a point \(\vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}\). The torque acting about a point \(\vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k}\) is
1 \(42 \hat{i}-30 \hat{j}+6 \hat{k}\)
2 Zero
3 \(42 \hat{i}+30 \hat{j}-6 \hat{k}\)
4 \(42 \hat{i}+30 \hat{j}+6 \hat{k}\)
Explanation:
Position vector of the point at which force is acting \(\begin{aligned}& \vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}, \quad \vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k} \\& \overrightarrow{r_{12}}=\overrightarrow{r_{1}}-\overrightarrow{r_{2}}=(\hat{i}+2 \hat{j}+3 \hat{k})-(3 \hat{i}-2 \hat{j}-3 \hat{k}) \\& =-2 \hat{i}+4 \hat{j}+6 \hat{k}\end{aligned}\) Now \(\vec{\tau}=\overrightarrow{r_{12}} \times \vec{F}=(-2 \hat{i}+4 \hat{j}+6 \hat{k}) \times(4 \hat{i}-5 \hat{j}+3 \hat{k})\) \(\begin{aligned}& \vec{\tau}=\left|\begin{array}{ccc}\hat{i} & \hat{j} & \hat{k} \\-2 & 4 & 6 \\4 & -5 & 3\end{array}\right| \\& =\hat{i}(12+30)-\hat{j}(-6-24)+\hat{k}(10-16) \\& =(42 \hat{i}+30 \hat{j}-6 \hat{k}) N-m\end{aligned}\)
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366194
A force \(\vec{F}=5 \hat{i}+2 \hat{j}-5 \hat{k}\) acts on a particle whose position vector is \(\vec{r}=\hat{i}-2 \hat{j}+\hat{k}\). What is the torque about the origin?
366195
A thin rod of mass \(m\) and length \(l\) is made to rotate about an axis passing through its centre and perpendicular to it. If its angular velocity changes from 0 to \(\omega\) in time \(t\), the torque acting on it is
1 \(\dfrac{m \ell^{2} \omega}{12 t}\)
2 \(\dfrac{m \ell^{2} \omega}{3 t}\)
3 \(\dfrac{m \ell^{2} \omega}{t}\)
4 \(\dfrac{4 m \ell^{2} \omega}{3 t}\)
Explanation:
Since, \(\tau=I \alpha\) So, \(\tau=\left(\dfrac{m(2 \ell)^{2}}{12}\right)\left(\dfrac{\omega}{t}\right)\) or \(\tau=\dfrac{m \times 4 \ell^{2} \times \omega}{12 \times t}\) Or \(\tau = \frac{{4m{\ell ^2}\omega }}{{12t}} = \left( {\frac{{m{\ell ^2}\omega }}{{3t}}} \right)\)
366191
Assertion : Torque due to force is maximum when angle is \(90^{\circ}\). Reason : The unit of torque is 'Newton-metre'.
1 Both Assertion and Reason are correct and Reason is the correct explanation of the Assertion.
2 Both Assertion and Reason are correct but Reason is not the correct explanation of the Assertion.
3 Assertion is correct but Reason is incorrect.
4 Assertion is incorrect but reason is correct.
Explanation:
Torque \(\tau=r F \sin \theta\). Torque is maximum when the force is applied perpendicular to the lever arm (angle \(\theta=90^{\circ}\) ). The unit of torque is indeed Newton-meter. Reason does not explain Assertion. So correct option is (2).
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366192
A force of \(40 \mathrm{~N}\) acts on a point \(\mathrm{B}\) at the end of an L-shaped object as shown in the figure. The angle \(\theta\) that will produce maximum moment of the force about point \(\mathrm{A}\) is given by:
1 \(\tan \theta=4\)
2 \(\tan \theta=\dfrac{1}{4}\)
3 \(\tan \theta=\dfrac{1}{2}\)
4 \(\tan \theta=2\)
Explanation:
Moment of force will be maximum when line of action of force is perpendicular to line \(\mathrm{AB}\). \(\tan \theta=\dfrac{2}{4}=\dfrac{1}{2}\)
JEE - 2018
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366193
A force \(\vec{F}=4 \hat{i}-5 \hat{j}+3 \hat{k}\) is acting at a point \(\vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}\). The torque acting about a point \(\vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k}\) is
1 \(42 \hat{i}-30 \hat{j}+6 \hat{k}\)
2 Zero
3 \(42 \hat{i}+30 \hat{j}-6 \hat{k}\)
4 \(42 \hat{i}+30 \hat{j}+6 \hat{k}\)
Explanation:
Position vector of the point at which force is acting \(\begin{aligned}& \vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}, \quad \vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k} \\& \overrightarrow{r_{12}}=\overrightarrow{r_{1}}-\overrightarrow{r_{2}}=(\hat{i}+2 \hat{j}+3 \hat{k})-(3 \hat{i}-2 \hat{j}-3 \hat{k}) \\& =-2 \hat{i}+4 \hat{j}+6 \hat{k}\end{aligned}\) Now \(\vec{\tau}=\overrightarrow{r_{12}} \times \vec{F}=(-2 \hat{i}+4 \hat{j}+6 \hat{k}) \times(4 \hat{i}-5 \hat{j}+3 \hat{k})\) \(\begin{aligned}& \vec{\tau}=\left|\begin{array}{ccc}\hat{i} & \hat{j} & \hat{k} \\-2 & 4 & 6 \\4 & -5 & 3\end{array}\right| \\& =\hat{i}(12+30)-\hat{j}(-6-24)+\hat{k}(10-16) \\& =(42 \hat{i}+30 \hat{j}-6 \hat{k}) N-m\end{aligned}\)
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366194
A force \(\vec{F}=5 \hat{i}+2 \hat{j}-5 \hat{k}\) acts on a particle whose position vector is \(\vec{r}=\hat{i}-2 \hat{j}+\hat{k}\). What is the torque about the origin?
366195
A thin rod of mass \(m\) and length \(l\) is made to rotate about an axis passing through its centre and perpendicular to it. If its angular velocity changes from 0 to \(\omega\) in time \(t\), the torque acting on it is
1 \(\dfrac{m \ell^{2} \omega}{12 t}\)
2 \(\dfrac{m \ell^{2} \omega}{3 t}\)
3 \(\dfrac{m \ell^{2} \omega}{t}\)
4 \(\dfrac{4 m \ell^{2} \omega}{3 t}\)
Explanation:
Since, \(\tau=I \alpha\) So, \(\tau=\left(\dfrac{m(2 \ell)^{2}}{12}\right)\left(\dfrac{\omega}{t}\right)\) or \(\tau=\dfrac{m \times 4 \ell^{2} \times \omega}{12 \times t}\) Or \(\tau = \frac{{4m{\ell ^2}\omega }}{{12t}} = \left( {\frac{{m{\ell ^2}\omega }}{{3t}}} \right)\)
366191
Assertion : Torque due to force is maximum when angle is \(90^{\circ}\). Reason : The unit of torque is 'Newton-metre'.
1 Both Assertion and Reason are correct and Reason is the correct explanation of the Assertion.
2 Both Assertion and Reason are correct but Reason is not the correct explanation of the Assertion.
3 Assertion is correct but Reason is incorrect.
4 Assertion is incorrect but reason is correct.
Explanation:
Torque \(\tau=r F \sin \theta\). Torque is maximum when the force is applied perpendicular to the lever arm (angle \(\theta=90^{\circ}\) ). The unit of torque is indeed Newton-meter. Reason does not explain Assertion. So correct option is (2).
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366192
A force of \(40 \mathrm{~N}\) acts on a point \(\mathrm{B}\) at the end of an L-shaped object as shown in the figure. The angle \(\theta\) that will produce maximum moment of the force about point \(\mathrm{A}\) is given by:
1 \(\tan \theta=4\)
2 \(\tan \theta=\dfrac{1}{4}\)
3 \(\tan \theta=\dfrac{1}{2}\)
4 \(\tan \theta=2\)
Explanation:
Moment of force will be maximum when line of action of force is perpendicular to line \(\mathrm{AB}\). \(\tan \theta=\dfrac{2}{4}=\dfrac{1}{2}\)
JEE - 2018
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366193
A force \(\vec{F}=4 \hat{i}-5 \hat{j}+3 \hat{k}\) is acting at a point \(\vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}\). The torque acting about a point \(\vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k}\) is
1 \(42 \hat{i}-30 \hat{j}+6 \hat{k}\)
2 Zero
3 \(42 \hat{i}+30 \hat{j}-6 \hat{k}\)
4 \(42 \hat{i}+30 \hat{j}+6 \hat{k}\)
Explanation:
Position vector of the point at which force is acting \(\begin{aligned}& \vec{r}_{1}=\hat{i}+2 \hat{j}+3 \hat{k}, \quad \vec{r}_{2}=3 \hat{i}-2 \hat{j}-3 \hat{k} \\& \overrightarrow{r_{12}}=\overrightarrow{r_{1}}-\overrightarrow{r_{2}}=(\hat{i}+2 \hat{j}+3 \hat{k})-(3 \hat{i}-2 \hat{j}-3 \hat{k}) \\& =-2 \hat{i}+4 \hat{j}+6 \hat{k}\end{aligned}\) Now \(\vec{\tau}=\overrightarrow{r_{12}} \times \vec{F}=(-2 \hat{i}+4 \hat{j}+6 \hat{k}) \times(4 \hat{i}-5 \hat{j}+3 \hat{k})\) \(\begin{aligned}& \vec{\tau}=\left|\begin{array}{ccc}\hat{i} & \hat{j} & \hat{k} \\-2 & 4 & 6 \\4 & -5 & 3\end{array}\right| \\& =\hat{i}(12+30)-\hat{j}(-6-24)+\hat{k}(10-16) \\& =(42 \hat{i}+30 \hat{j}-6 \hat{k}) N-m\end{aligned}\)
PHXI07:SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
366194
A force \(\vec{F}=5 \hat{i}+2 \hat{j}-5 \hat{k}\) acts on a particle whose position vector is \(\vec{r}=\hat{i}-2 \hat{j}+\hat{k}\). What is the torque about the origin?
366195
A thin rod of mass \(m\) and length \(l\) is made to rotate about an axis passing through its centre and perpendicular to it. If its angular velocity changes from 0 to \(\omega\) in time \(t\), the torque acting on it is
1 \(\dfrac{m \ell^{2} \omega}{12 t}\)
2 \(\dfrac{m \ell^{2} \omega}{3 t}\)
3 \(\dfrac{m \ell^{2} \omega}{t}\)
4 \(\dfrac{4 m \ell^{2} \omega}{3 t}\)
Explanation:
Since, \(\tau=I \alpha\) So, \(\tau=\left(\dfrac{m(2 \ell)^{2}}{12}\right)\left(\dfrac{\omega}{t}\right)\) or \(\tau=\dfrac{m \times 4 \ell^{2} \times \omega}{12 \times t}\) Or \(\tau = \frac{{4m{\ell ^2}\omega }}{{12t}} = \left( {\frac{{m{\ell ^2}\omega }}{{3t}}} \right)\)